Detector Configuration
The detector configuration consists of a set of sections describing the detectors in the setup. Each section starts with a header describing the name used to identify the detector; all names are required to be unique. Every detector has to contain all of the following parameters:
-
A string referring to the
typeof the detector model. The model should exist in the search path as described in Section 5.2. -
The 3-dimensional
positionin the world frame in the order x, y, z. See Section 5.1 for details. -
The
orientationspecified as X-Y-Z extrinsic Euler angles. This means the detector is rotated first around the world’s X-axis, then around the world’s Y-axis and then around the world’s Z-axis. Alternatively the orientation can be set as Z-Y-X or Z-X-Z extrinsic Euler angles, refer to section Section 5.1 for details.
In addition to these required parameters, the following parameters allow to randomly misalign the respective detector from its initial position. The values are interpreted as width of a normal distribution centered around zero. In order to reproduce misalignments, a fixed random seed for the framework core can be used as explained in Section 3.4. Misalignment can be introduced both for shifts along the three global axes and the three rotations angles with the following parameters:
-
The parameter
alignment_precision_positionallows the specification of the alignment precision along the three global axes. Each value represents the Gaussian width with which the detector will be randomly misaligned along the corresponding axis. -
The parameter
alignment_precision_orientationallows to specify the alignment precision in the three rotation angles defined by theorientationparameter. The misalignments are added to the individual angles before combining them into the final rotation as defined by theorientation_modeparameter.
The optional parameter role accepts the values active for detectors and passive for passive elements in the setup. If
no value is given, active is taken as the default value.
Furthermore it is possible to specify certain parameters of the detector, which is explained in more detail in Section 5.2. This allows to quickly adapt e.g. the sensor thickness of a certain detector without altering the actual detector model file.
An example configuration file describing a setup with one CLICpix2 detector and two Timepix [@timepix] models is the following:
# Placement of first detector, named "telescope1"
[telescope1]
# Type to the detector is the "timepix" model
type = "timepix"
# Position the detector at the origin of the world frame
position = 0 0 0mm
# Default orientation: perpendicular to the incoming beam
orientation = 0 0 0
# Placement of the second detector, the "DUT (device under test)
[dut]
# Detector model is "clicpix2"
type = "clicpix2"
# Position is downstream of "telescope1":
position = 100um 100um 25mm
# Rotated by 20 degrees around the world x-axis
orientation = 20deg 0 0
# Third detector is downstream "telescope2"
[telescope2]
# Detector type again is "timepix"
type = "timepix"
# Placement 50 mm downstream of the first detector
position = 0 0 50mm
# Default orientation
orientation = 0 0 0
This configuration is used in the rest of this chapter for explaining concepts. A visualization of the setup is given below.
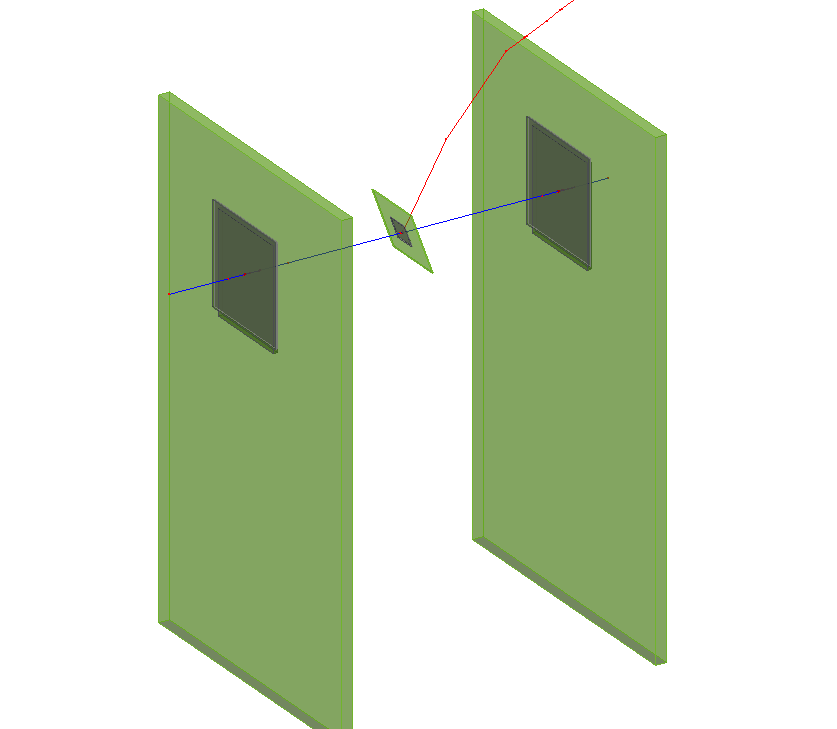
Visualization of a Pion passing through the telescope setup defined in the detector configuration file. A secondary particle
is produced in the material of the detector in the center.
Passive material configuration
Descriptions of passive materials can be added to the detector setup via a set of sections, with a syntax similar to the
detector configuration. Passive geometry entries are identified by the role parameter set to passive. Each section starts
with a header describing the name used to identify the passive material; all names are required to be unique.
Every passive material has to contain all of the following parameters:
-
The
positionandorientationof the material as described for the detector, see Section 3.3. -
A string referring to the
typeof the passive material. The model should be interpreted by the module constructing the passive material, for example theGeometryBuilderGeant4module. -
A string referring to the
materialof the passive material. The materials for theGeometryBuilderGeant4module are defined in the module documentation. -
A set of size parameters specific for the model that is chosen. All size parameters that describe the total length of something are placed such that half of this total length extends from each side of the given
position. If a parameter describes the radius, this means the radius will extend from thepositionon both sides, making its total size two times the radius in the given direction. The size parameters for the specific models in theGeometryBuilderGeant4module are described in the module documentation.
In addition, an optional string referring to the mother_volume, which defines another passive material the volume will be
placed in, can be specified.
Note
If a mother volume is chosen, the position defined in the configuration file will be relative to the center of the mother volume. An error will be given if the specified mother volume is too small for the specified size or position of this volume. Per default, the mother volume is the world frame.Note
If themother_volume is a hollow material, only the non-hollow part of the material is considered part of the material.
Placing a passive volume in the hollow part requires a different mother_volume.
Similar to the detector configuration, the parameters orientation_mode (see
Section 5.1), alignment_precision_position and
alignment_precision_orientation (see Section 3.3) can be used optionally to define the
rotation order and a possible misalignment of passive materials.
An example configuration file describing a set of passive materials with different configuration options is the following:
# Placement of a box made of lead
[box1]
type = "box"
size = 100mm 100mm 100mm
position = 200mm 200mm 0mm
orientation = 0 0deg 0deg
material = "lead"
role = "passive"
# Placement of a box made of lead
[box2]
type = "box"
size = 100mm 100mm 100mm
position = 0mm 200mm 0mm
orientation = 0 0deg 0deg
material = "lead"
role = "passive"
# Placement of a box made of lead, with a hollow opening
[box3]
type = "box"
size = 100mm 100mm 100mm
inner_size = 80mm 80mm 100mm
position = -200mm 200mm 0mm
orientation = 0 0deg 0deg
material = "lead"
role = "passive"
# Placement of a box made of aluminum, inside box1
[box4]
type = "box"
size = 50mm 50mm 50mm
position = 0mm 0mm -0mm
orientation = 0 0deg 0deg
material = "aluminum"
mother_volume = box1
role = "passive"
# Placement of a box made of the world material, inside box2
[box5]
type = "box"
size = 50mm 50mm 50mm
position = 0mm 0mm -0mm
orientation = 0 0deg 0deg
material = "world_material"
mother_volume = box2
role = "passive"
# Placement of a cylinder made of lead, with a hollow opening
[cylinder1]
type = "cylinder"
outer_radius = 50mm
inner_radius = 40mm
length = 100mm
position = 200mm 0mm 0mm
orientation = 0 0deg 0deg
material = "lead"
role = "passive"
# Placement of a cylinder made of lead
[cylinder2]
type = "cylinder"
outer_radius = 50mm
length = 100mm
position = 0mm 0mm 0mm
orientation = 0 0deg 0deg
material = "lead"
role = "passive"
# Placement of a cylinder made of lead, with a hollow opening, starting the building at an angle of 60deg and continue for 270deg
[cylinder3]
type = "cylinder"
outer_radius = 50mm
inner_radius = 20mm
length = 100mm
starting_angle = 60deg
arc_length = 270deg
position = -200mm 0mm 0mm
orientation = 0 0deg 0deg
material = "lead"
role = "passive"
# Placement of a cylinder made of the world material, inside cylinder2
[cylinder4]
type = "cylinder"
outer_radius = 25mm
length = 50mm
position = 0mm 0mm 0mm
orientation = 0 0deg 0deg
material = "world_material"
mother_volume = cylinder2
role = "passive"
# Placement of a sphere made of lead
[sphere1]
type = "sphere"
outer_radius = 50mm
position = 200mm -200mm 0mm
orientation = 0 0deg 0deg
material = "lead"
role = "passive"
# Placement of a sphere made of lead, with a hollow opening, starting the building at a phi angle of 90deg and continue for 180deg.
[sphere2]
type = "sphere"
outer_radius = 50mm
inner_radius = 30mm
starting_angle_phi = 90deg
arc_length_phi = 180deg
position = 0mm -200mm 0mm
orientation = 0 0deg 0deg
material = "lead"
role = "passive"
# Placement of a sphere made of lead, starting the building at a theta angle of 0deg and continue for 45deg.
[sphere3]
type = "sphere"
outer_radius = 50mm
arc_length_theta = 45deg
position = -200mm -200mm 0mm
orientation = 0 -90deg 0deg
material = "lead"
role = "passive"
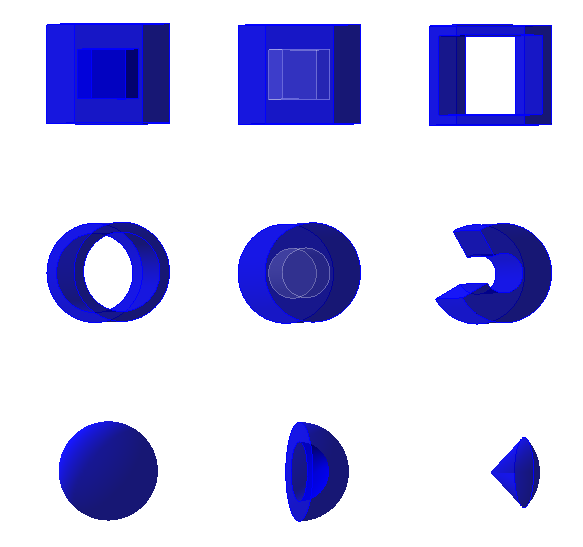
Visualization of the setup described in the geometry file.